Maker Faire Tokyo 2025開催直前に誤検知の問題が見つかり、ケースの販売を見合わせた「ラップタイマー簡易版(仮)」ですが、実験を続けた結果、出口が見えてきました!

当初は設置角度かな? と結論づけそうになったり、センサーの感度や検知スピードを上げたりもしましたが、どうもそれだけではないようで改善はするものの解決しませんでした。
たくさんテストを重ねるうち、対向にウォールを置くと精度良く検知できることに気づきました。箱に入れて計測する場合に検知ミスが少なかったので、ひょっとして? と思って試してみた感じです。
まずは壁になりそうな物体(ラップタイマー2号機の背面)を置いてテスト。

壁の有無で物体の検知位置(画面最上段中央)が明らかに近くなっています。ただ、この時は路面が黒く反射する素材で、値の差が大きく出ていました。こんなところでも変わるのがTOFの難しいところ。きっと路面の近くで使うものではないのかもしれませんね^ ^。
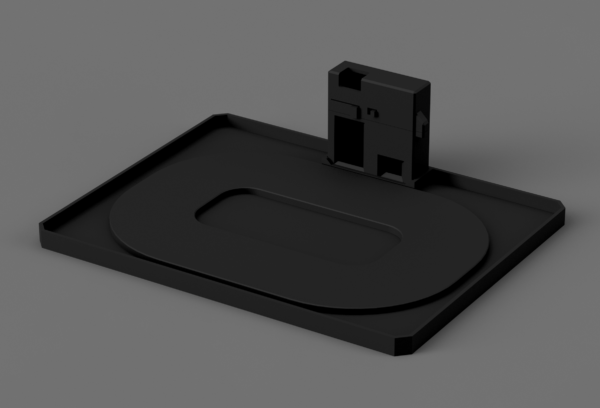
こんな感じで精度が上がると確認できたので、使いやすいウォールをモデリングしてナノサイズのBBBMで走行テスト。結果はかなり良く、1枚目の写真を撮影しました。
どういう理屈なのかはちょっと謎。もともと反射しているところに、何か物体が遮ったら、全高が低かったり黒かったりなどで条件が厳しくても値が手前に揺れるというところでしょうか。いずれにしても、これで今まで検知ミスが頻発していたマシン(ホバーマシンと耐久タイプのナノサイズ)も計測できるようになりました。検知ミスが全く出なくなることはないとは思いますが、何十回かやってみたところ大丈夫な感じ。もうしばらく実験を続けようと思います。
ラップタイマー簡易版お値段
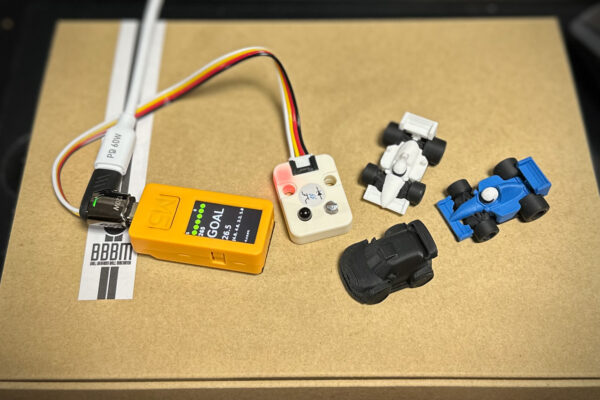
ケースは600円程度を考えています。プラスで送料が180円。そのほかにご準備いただくものは
- M5StickC Plus2:円
- 5cmケーブル(10本入り):円
- TOFユニット:円
- ひっつきむし:円
となります。プログラムはどこかでダウンロードできるようにする予定です。